Não preciso falar nada, não se deve tirar os olhos de cima do peão, depois se machuca ou morre, o culpado e sempre o responsável é o Engenheiro, sai nos jornais aí a carreira do cidadão vai para lama.

sexta-feira, 30 de março de 2012
quarta-feira, 28 de março de 2012
Inteligência artificial dispensa humanos para pilotar aviões
Tela do simulador onde está sendo testado o piloto totalmente automático, capaz de levar um avião de um aeroporto a outro sem nenhuma intervenção humana.[Imagem: FIUPM]
O piloto vai sumir
Como os aviões já possuem pilotos automáticos, que os ajudam a permanecer no ar sem participação do piloto humano, será necessário criar uma nova categoria para enquadrar um novo assistente autônomo que está sendo desenvolvido por engenheiros espanhóis.
O sistema é capaz não apenas de manter o avião no ar, mas também de realizar os pousos e decolagens e fazer manobras para evitar riscos de colisão com outras aeronaves.
Em um aeroporto simulado em computador, o agente de software inteligente pilota todos os aviões, sem nenhum incidente e sem nenhuma participação humana.
E, quando se fala "sem nenhuma participação humana", isto significa sem participação de humanos mesmo, sejam pilotos, sejam controladores de voo.
Aprendizagem de máquina
Santiago Álvarez de Toledo e José María Barreiro Sorrivas, da Universidade Politécnica de Madri, levaram mais de 10 anos para desenvolver o sistema, contando com a colaboração de inúmeros outros pesquisadores e estudantes.
Segundo eles, o sistema de inteligência artificial emprega um algoritmo de aprendizagem de máquina inspirado na forma como os seres vivos aprendem a se movimentar.
O programa resultante, que inclui um simulador de toda a aviônica das aeronaves, consegue harmonizar a trajetória de cada avião com a dos outros aviões nas cercanias de um aeroporto.
O simulador mostrou-se preciso mesmo quando foi simulado um aeroporto internacional operando no limite de sua capacidade.
Além do aprendizado de máquina, os pesquisadores inseriram no sistema uma biblioteca com todas as combinações de incidentes de voo já registradas, o que o tornou capaz de resolver desde situações simples, como ajustes de rotas, até situações que poderiam redundar rapidamente em riscos de acidentes.
Imponderabilidades humanas
O programa é capaz de pilotar o avião automaticamente, da decolagem até o pouso, seguindo um objetivo previamente traçado - como ir de um aeroporto até outro - ou uma sequência de objetivos - como uma viagem com várias escalas.
Durante o voo, o sistema é capaz de desviar de qualquer tipo de obstáculo, desde um edifício nas cercanias de um aeroporto ou outras aeronaves, até áreas apontadas pelo sistema como meteorologicamente instáveis e regiões onde o espaço aéreo é fechado.
Como o piloto eletrônico autônomo passou com louvor por todos os testes nos simuladores, os engenheiros agora planejam testá-lo em aviões reais, "como uma medida adicional de segurança frente às imponderabilidades humanas," afirmam eles.
Fonte: Redação do Site Inovação Tecnológica
terça-feira, 27 de março de 2012
Robô água-viva usa músculos artificiais alimentados a hidrogênio
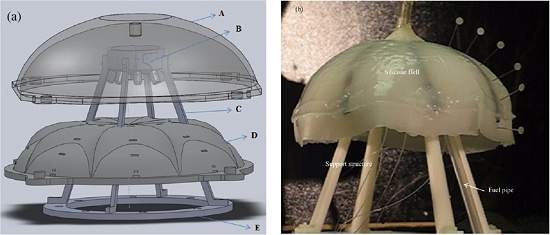 |
O movimento do robô é feito por músculos artificiais circulares instalados abaixo do seu corpo de silicone, como se fossem as varetas metálicas de um guarda-chuva. [Imagem: Tadesse et al./IOP] |
Robô geleia
Pesquisadores norte-americanos criaram uma água-viva robô que se movimenta suavemente, impulsionada por músculos artificiais alimentados por hidrogênio.
Em tese, o robô pode se movimentar indefinidamente, sem nunca ficar sem combustível, uma vez ela retira o hidrogênio de reações químicas que ocorrem em sua superfície - ele ainda não é capaz de fazer isto.
"Pelo que sabemos, esta é a primeira vez que um robô subaquático é alimentado usando hidrogênio externo como fonte de combustível," disse Yonas Tadesse, da Universidade Virgínia Tech, nos Estados Unidos, criador do robô.
O robô, que vem sendo desenvolvido desde 2009, foi adequadamente batizado do Robojelly, ou robô-geleia - jellyfish é o termo em inglês para água-viva.
A água-viva serviu de inspiração para um veículo subaquático devido à simplicidade e eficiência do seu sistema de movimentação, abrindo-se e ejetando a água, o que pode ser muito eficaz quando se trata de observar outras formas de vida no oceano.
Músculos artificiais a hidrogênio
O movimento do robô é feito por músculos artificiais circulares instalados abaixo do seu corpo, feito de silicone, como se fossem as varetas metálicas de um guarda-chuva.
Quando os músculos se contraem, o corpo se fecha, ejetando a água em um sentido e impulsionando o robô no outro.
Quando o estímulo é retirado dos músculos artificiais, estes se contraem, fazendo com que o robô volte ao seu formato original, estando pronto para o próximo impulso.
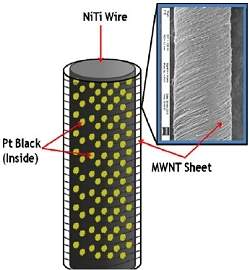 |
| O grande avanço do robô é o uso de músculos artificiais com um revestimento que permite que eles sejam acionados por uma reação exotérmica envolvendo o hidrogênio da água. [Imagem: Tadesse et al./IOP] |
O músculo artificial alimentado a hidrogênio consiste em um músculo artificial normal, do tipo SMA, feito de uma liga de níquel e titânio (NiTi), recoberto por uma folha de nanotubos de carbono e nanopartículas de platina.
O oxigênio e o hidrogênio na água reagem com platina, uma reação química que libera calor.
Os nanotubos de carbono servem tanto para levar o hidrogênio até o catalisador de platina, quanto para ajudar a conduzir o calor gerado pela reação até os músculos artificiais, fazendo-os assumir os diversos formatos necessários ao movimento.
Sem potência
A grande vantagem do conceito é que o robô não precisa de baterias e nem de reabastecimento. Tudo o que é necessário é que ele fique dentro d'água para se movimentar.
O primeiro protótipo não é muito eficiente e, apesar de "encenar" adequadamente, o hidrogênio que chega aos músculos artificiais não gera uma potência suficiente para fazê-lo sair do lugar.
Mas a capacidade de movimento foi demonstrada alimentando os músculos artificiais com uma fonte externa de eletricidade.
"Nós agora estamos procurando novas maneiras de levar o hidrogênio a cada segmento, para que cada um possa ser controlado individualmente. Isso deverá permitir que o robô seja controlado e se mova em diferentes direções," disse Tadesse.
Fonte: Redação do Site Inovação Tecnológica
O oxigênio e o hidrogênio na água reagem com platina, uma reação química que libera calor.
Os nanotubos de carbono servem tanto para levar o hidrogênio até o catalisador de platina, quanto para ajudar a conduzir o calor gerado pela reação até os músculos artificiais, fazendo-os assumir os diversos formatos necessários ao movimento.
Sem potência
A grande vantagem do conceito é que o robô não precisa de baterias e nem de reabastecimento. Tudo o que é necessário é que ele fique dentro d'água para se movimentar.
O primeiro protótipo não é muito eficiente e, apesar de "encenar" adequadamente, o hidrogênio que chega aos músculos artificiais não gera uma potência suficiente para fazê-lo sair do lugar.
Mas a capacidade de movimento foi demonstrada alimentando os músculos artificiais com uma fonte externa de eletricidade.
"Nós agora estamos procurando novas maneiras de levar o hidrogênio a cada segmento, para que cada um possa ser controlado individualmente. Isso deverá permitir que o robô seja controlado e se mova em diferentes direções," disse Tadesse.
Fonte: Redação do Site Inovação Tecnológica
segunda-feira, 26 de março de 2012
O egenheiro
Bom dia pessoal, segue um vídeo ai para motivar os futuros engenheiros nessa ardua estrada...
sábado, 24 de março de 2012
Solução simples
Acho que todo mundo ja ouviu esta história, da fabrica de pasta de dente, é um exemplo que engenharia nem sempre é achar uma solução mais complicada.
quinta-feira, 22 de março de 2012
Robôs movidos por ondas batem recorde mundial de distância
 | ||
| Esta é apenas a primeira etapa da jornada dos robôs marítimos,prevista para alcançar 16.000 km.[Imagem: Liquid Robotics] |
Recorde robótico
Quatro robôs navegantes estabeleceram um novo recorde mundial de
distância, flutuando autonomamente por mais de 3.200 milhas náuticas
(5.926 km) ao longo do Oceano Pacífico.
Os robôs marítimos partiram da baía de São Francisco, na Califórnia, em Novembro do ano passado.
O recorde foi batido quando a "equipe" chegou ao Havaí.
Contudo, esta é apenas a primeira etapa de sua jornada, prevista para alcançar 16.000 km.
Os robôs são parte de um projeto para coletar dados sobre a
composição e a qualidade da água do mar, servindo também de divulgação
para o fabricante, a Liquid Robotics.
Hemisférios diferentes
Os dados, transmitidos continuamente à base, indicam que os robôs flutuantes sobreviveram a ondas de até 8 metros.
Mas o pior pode estar por vir, conforme o grupo se dividirá, dois
indo em direção ao Japão e dois rumando a sudoeste, cruzando o equador
até chegar à Austrália.
 |
| O movimento de subir e descer as ondas, feito pela parte superior, é transmitido pelo cabo até a parte inferior, movimentando as alhetas e, por decorrência, o robô. [Imagem: Liquid Robotics] |
Como a primeira metade do trajeto, considerada mais suave, levou
quatro meses para ser percorrida, os engenheiros acreditam que poderão
esperar pelos robôs no Japão e na Austrália no fim de 2012 ou início de
2013.
Robôs movidos por ondas
Cada robô é composto por duas metades: a parte superior, uma espécie
de prancha de surf, está ligada por um cabo a uma parte inferior
submersa, contendo uma série de alhetas e uma quilha.
O movimento de subir e descer as ondas, feito pela parte superior, é
transmitido pelo cabo até a parte inferior, movimentando as aletas e,
por decorrência, o robô.
Os painéis solares instalados sobre a superfície superior alimentam os sensores que fazem leituras a cada 10 minutos para medir a salinidade, a temperatura a fluorescência e o oxigênio dissolvido na água.
Fonte: Redação do Site Inovação Tecnológica - 20/03/2012
quarta-feira, 21 de março de 2012
terça-feira, 20 de março de 2012
Sistema de irrigação inteligente economiza água e produz mais
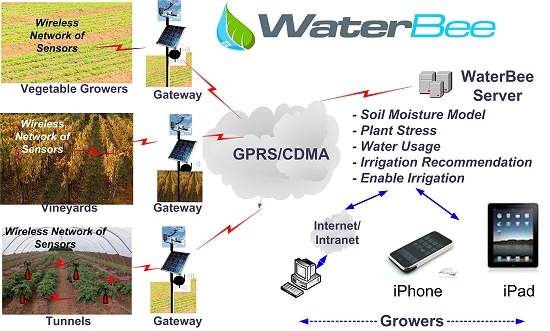 |
| O sistema já foi testado em várias culturas, e agora será submetido a múltiplos climas. [Imagem: WaterBee project] |
Economia de água na irrigação
O uso da irrigação está presente desde os primeiros registros históricos da humanidade.
Mas o problema crescente da escassez de água tem mostrado que é necessário economizar até mesmo quando o assunto é aumentar a produtividade na produção de alimentos.
Para isso, uma equipe de pesquisadores europeus desenvolveu uma tecnologia que eles chamam de sistema de irrigação inteligente.
O melhor de tudo é que, além de economizar água e reduzir o custo para os agricultores, o novo sistema resultou em um aumento na produção das lavouras.
"Nós desenvolvemos um sistema de irrigação inteligente que economiza 40% de água na irrigação. E nós esperamos que ele tenha um grande impacto porque 60% de toda a água doce no mundo é usada para irrigação," afirma o Dr. John O'Flaherty, coordenador do projeto Waterbee.
Rede de sensores na lavoura
Enquanto um sistema similar, desenvolvido nos Estados Unidos, usa a espessura da folha como indicador da hora de iniciar e interromper a irrigação, a equipe do WaterBee optou pela técnica mais simples, usando sensores de umidade colocados no solo.
A rede de sensores sem fios indica o nível de umidade do solo com precisão em cada área da lavoura.
Um programa de computador recebe as leituras dos sensores e avalia os melhores horários e a intensidade da água a ser lançada, de forma a maximizar os efeitos da irrigação, sobretudo o tempo de retenção de umidade pelo solo.
Segundo o Dr. O'Flaherty, calculando o uso do sistema apenas na Europa, o mercado potencial para a inovação atinge meio bilhão de euros.
Testes
O sistema está em fase de testes em fazendas de culturas variadas na Espanha.
Com os bons resultados iniciais, a equipe agora está irá iniciar uma segunda fase de avaliações, cujo principal objetivo é testar o sistema em diferentes climas e novas culturas.
Já foram selecionadas fazendas para testes na Estônia, Itália, Malta, Suécia e Reino Unido.
O uso da irrigação está presente desde os primeiros registros históricos da humanidade.
Mas o problema crescente da escassez de água tem mostrado que é necessário economizar até mesmo quando o assunto é aumentar a produtividade na produção de alimentos.
Para isso, uma equipe de pesquisadores europeus desenvolveu uma tecnologia que eles chamam de sistema de irrigação inteligente.
O melhor de tudo é que, além de economizar água e reduzir o custo para os agricultores, o novo sistema resultou em um aumento na produção das lavouras.
"Nós desenvolvemos um sistema de irrigação inteligente que economiza 40% de água na irrigação. E nós esperamos que ele tenha um grande impacto porque 60% de toda a água doce no mundo é usada para irrigação," afirma o Dr. John O'Flaherty, coordenador do projeto Waterbee.
Rede de sensores na lavoura
Enquanto um sistema similar, desenvolvido nos Estados Unidos, usa a espessura da folha como indicador da hora de iniciar e interromper a irrigação, a equipe do WaterBee optou pela técnica mais simples, usando sensores de umidade colocados no solo.
A rede de sensores sem fios indica o nível de umidade do solo com precisão em cada área da lavoura.
Um programa de computador recebe as leituras dos sensores e avalia os melhores horários e a intensidade da água a ser lançada, de forma a maximizar os efeitos da irrigação, sobretudo o tempo de retenção de umidade pelo solo.
Segundo o Dr. O'Flaherty, calculando o uso do sistema apenas na Europa, o mercado potencial para a inovação atinge meio bilhão de euros.
Testes
O sistema está em fase de testes em fazendas de culturas variadas na Espanha.
Com os bons resultados iniciais, a equipe agora está irá iniciar uma segunda fase de avaliações, cujo principal objetivo é testar o sistema em diferentes climas e novas culturas.
Já foram selecionadas fazendas para testes na Estônia, Itália, Malta, Suécia e Reino Unido.
Fonte: Redação do Site Inovação Tecnológica - 19/03/2012
segunda-feira, 19 de março de 2012
O copro humano visto por engenheiros
Quem trabalha em uma fábrica constuma dizer, que ele é um organismo vivo, mas essa ai é demais!
O Jeito
Bom dia companheiros, seguda-feira chegou, passamos o fim de semana todo resolvendo exercicios de: "Tião", "Dantas" e "Leôncio" (os nomes das matérias são bem maiores que dos prof.). Para descontrari segue um vídeo que o colega Elenilsom mandou:
sexta-feira, 16 de março de 2012
Servo Motor
Ola pessoal complementando o último vídeo sobre Arduino: Controlar Servo com Arduino, para explicar melhor sobre o componente.
quarta-feira, 14 de março de 2012
Bosch leiloa máquinas-ferramenta na próxima semana
A Bosch irá leiloar, no dia 21 de março, veículos, equipamentos industriais, para laboratório, infraestrutura, entre outros, em virtude de programa de renovação de frota e venda de ativos sem uso.
São mais de 40 lotes localizados em Curitiba (PR), Campinas e Limeira (SP), entre os quais podemos destacar fresadora de engrenagens Liebherr, Torno CNC Romi Galaxi 20, Máquina de medição Mycrona Signum digital, ano: 2003, Retífica interna Seiko sig 22sc, Torno automático Traub tb42, 2002, entre outros.
O encerramento acontecerá no dia 21 de março a partir das 13h00. A utilização da internet no processo proporciona que interessados possam participar de imediato, oferecendo os lances através do site da Superbid (www.superbid.net)
terça-feira, 13 de março de 2012
Motor 4T - Boa ilustração
Boa tarde pessoal, navegando nesse diluvio de informações, que é a internet, achei esta imagem, achei muito legal, bastante didática. Mostra muito bem os 4 tempos de um motor a combustão interna a gasolina, e seus principais componentesde funcionamento. Espero que gostem também.

Controlar Servo com Arduino
Boa madrugada caros acadêmicos, este teste fiz á algum tempo, só não tive tempo de gravar, segue o vídeo ai embaixo, e o código comentado. O servomotor é fácil de achar, o meu é de antena parabólica velha, novo da para achar em casas de antenas e eletrônicas. Boa sorte...
======================== CODIGO ======================
#include <Servo.h> //inclui a biblioteca
Servo myservo; // cria o objeto servo para controlar um servo
int potpin = 0; // analógico usado para conectar o potenciômetro
int val; // variável para ler o valor do pino analógico
void setup()
{
myservo.attach(9); // atribui o servo no pino 2 para o objeto servo
}
void loop(){
val = analogRead(potpin); // lê o valor do potenciómetro (0 e 1023)
val = map(val, 0, 1023, 0, 179); // escalá-lo para usá no servo (0 e 180)
myservo.write(val); // define a posição de servo de acordo com o valor escalado
delay(15); // aguarda o servo chegar
//Servo::refresh();
}
domingo, 11 de março de 2012
quinta-feira, 8 de março de 2012
CeBIT
A maior feira de tecnologia e comunicação do mundo, a CeBIT, esta aberta nesta segunda-feira (05/03) em Hannover, na Alemanha, com o Brasil na posição de destaque, como país-parceiro do evento deste ano.
Com direito à presença da presidente Dilma Rousseff, que discursará na abertura ao lado da chanceler (primeira-ministra) alemã, Angela Merkel, o Brasil tenta aproveitar a oportunidade para vender ao mundo uma imagem de polo importante de produção de tecnologia.
Nos últimos anos o Brasil consolidou sua imagem como um dos maiores produtores e exportadores mundiais de commodities, mas o país espera também ganhar espaço no mercado para produtos com alto valor agregado, como no setor de tecnologia.
Com direito à presença da presidente Dilma Rousseff, que discursará na abertura ao lado da chanceler (primeira-ministra) alemã, Angela Merkel, o Brasil tenta aproveitar a oportunidade para vender ao mundo uma imagem de polo importante de produção de tecnologia.
Nos últimos anos o Brasil consolidou sua imagem como um dos maiores produtores e exportadores mundiais de commodities, mas o país espera também ganhar espaço no mercado para produtos com alto valor agregado, como no setor de tecnologia.
Segundo o governo brasileiro, o país é hoje o sexto maior mercado consumidor do setor de tecnologia e comunicação, mas a produção atualmente é voltada principalmente para o consumo interno.

Robô fará apresentação de pole dance durante o evento. A feira de tecnologia tem o Brasil como destaque este ano e ocorre entre os dias 6 e 10 de março de 2012 em Hannover, Alemanha Mais Fabian Bimmer/Reuters
quarta-feira, 7 de março de 2012
RedFIR bola inteligente

Chip dentro de uma bola de futebol é capaz de enviar informações sobre a evolução da partida. A novidade foi demonstrada na CeBIT, feira de tecnologia em Hannover, Alemanha. Chamado de RedFIR, o sistema funciona com rastreamento via ondas de rádio que indicam a posição exata de objetos e pessoas. Além de chips na bola, outros também são colocados nos uniformes dos jogadores. Assim, são enviadas informações sobre velocidade, força no chute, número de passes, etc. Esses dados ajudam tanto no treinamento da equipe como na transmissão dos jogos ao vivo
Cimatron ensina como calcular orçamento de produção de moldes

A Cimatron, fornecedora de soluções de CAD/CAM para a indústria de ferramentaria e usinagem em geral, realiza seminário online que ensina como fazer um orçamento perfeito para a produção de moldes. O seminário será realizado dia 9 de março, das 16h às 17h (horário de Brasília), e apresentado por Tom Bergman, vice-presidente de produção da Aluminum Injection Mold Company e Dan Branch, gerente da Cimatron Technologies, Inc.
Os palestrantes falaram sobre a importância do uso de plataforma 3D e quais as mudanças que ele oferece. Outro tópico que será abordado é como criar uma cadeia de processo lean. Para participar do seminário internacional, em Inglês, os interessados devem fazer a inscrição na página do evento.
terça-feira, 6 de março de 2012

domingo, 4 de março de 2012
Tudo começou com uma palavra - mecatrônica - criada pela empresa japonesa Yaskawa no final da década de sessenta para nomear um conceito inovador e revolucionário para a época, que sintetizava a comunhão entre a mecânica, a eletrônica e sistema de controle, e que mudaria para sempre o cenário industrial. Hoje, em plena era marcada por adventos tecnológicos, é difícil imaginar o mundo sem essa integração sinergética.
Sinônimo de automação industrial, a mecatrônica começou a ser delineada em 1953 quando a Yaskawa, que até então fabricava e abastecia o mercado de mineração de carvão com equipamentos elétricos (principalmente motores), mudou de foco e passou a desenvolver produtos usados na fabricação de aço, para inicialmente atender as necessidades de uma usina siderúrgica das imediações.
A Yaskawa fez o pedido de registro da marca “Mechatronics” em 26 de agosto de 1970, e este foi concedido em 22 de janeiro de 1973. Na época, por ser uma tecnologia muito avançada, a empresa optou por não fazer uma ampla divulgação. E quando chegou o momento de renovar o registro, o termo já havia se tornado tão conhecido na indústria que a Yaskawa decidiu ceder seus direitos exclusivos sobre a marca. A partir de 1987, com o lançamento da revista Mechatronics, publicada pela Gicho (The Technical Investigations Society) a palavra mecatrônica passou a ser amplamente usada nos meios de comunicação e também para descrever o currículo educacional das faculdades de engenharia, tipos de produtos, nomes de empresas, e para soluções de automação.

José Rubinato, diretor geral da Yaskawa Elétrico do Brasil, destaca que atualmente a mecatrônica não perdeu sua característica inovadora e continua sendo uma das mais novas áreas da engenharia em todo o mundo. “Ela funciona como uma espécie de futuro das engenharias, já que utiliza as tecnologias de mecânica, eletrônica e a tecnologia da informação para fornecer produtos, sistemas e processos melhorados”, justifica o executivo. Faculdades renomadas em exatas, como a Escola Politécnica da USP, a Unicamp e UNB oferecem a disciplina engenharia mecatrônica, em que são estudadas as matérias comuns a qualquer engenharia, tais como: cálculo, física, mecânica e elétrica básica. Na parte específica, no entanto, são introduzidas disciplinas que incluem circuitos lógicos, controle de sistemas mecânicos, automação industrial e sistemas de computação.
Fonte adaptado de CIMM
quinta-feira, 1 de março de 2012
Solidworks permitirá intercâmbio de versões do software
 A versão 2012 do software Solidworks ainda está em processo de instalação em muitas empresas, mas uma prévia do que será possível encontrar na versão 2013 do software já foi divulgada em San Diego – Estados Unidos, durante o evento mundial da empresa, entre os dias 12 e 15 de fevereiro. A principal novidade, que levou o auditório com a presença de mais cinco mil pessoas à euforia, foi a possibilidade de trocar projetos em diferentes versões. Em 2013 os usuários poderão arquivos em versões imediatamente anterior a mais recente que estão utilizando.
A versão 2012 do software Solidworks ainda está em processo de instalação em muitas empresas, mas uma prévia do que será possível encontrar na versão 2013 do software já foi divulgada em San Diego – Estados Unidos, durante o evento mundial da empresa, entre os dias 12 e 15 de fevereiro. A principal novidade, que levou o auditório com a presença de mais cinco mil pessoas à euforia, foi a possibilidade de trocar projetos em diferentes versões. Em 2013 os usuários poderão arquivos em versões imediatamente anterior a mais recente que estão utilizando. A abertura de diversos arquivos para montagem em um mesmo plano também foi outra mudança que chamou atenção do gerente técnico da empresa no Brasil, Timóteo Müller. Ele destaca ainda a possibilidade de realizar equações paramétricas em qualquer interface, como na criação de um simples furo. Dessa forma dois furos que devem ficar a uma distância "y" serão automaticamente ajustados caso o local de um deles seja alterado.
Outra novidade é a inserção da função “envelope”. A novidade é útil, por exemplo, no desenvolvimento de projetos de chapas metálicas. Com a função será possível utilizar algo já projetado para continuar o desenvolvimento de um novo projeto.
Na mesma sessão foram divulgadas as principais solicitações dos usuários, mas que não necessariamente estarão disponíveis já na próxima versão. Entre os pontos levantados, estão o uso de mais cores da CPU, disponibilidade de opções para inserção automática do centro de gravidade nas propriedades de massa, incluir tecla de escape para retorno imediato do controle da interface, uma opção de criação passo-a-passo para construção de roscas.
Nova plataforma
 Ainda há muito mistério em relação ao lançamento da nova plataforma no software, a V6, a mesma utilizada pelo Catia e apresentada no evento mundial em 2010. O diretor de desenvolvimento, Kishore Boyalakuntla, preferiu não comentar sobre os boatos de que será baseada em cloud-computing e se limitou a dizer que ela estará disponível em "algum momento em 2013". Boyalakuntla diz que não há pressão para colocá-lo em prática, "uma nova plataforma só se justifica quando pudermos oferecer algo muito melhor do que já temos e vamos trabalhar até conseguirmos isto. Se não alcançarmos os resultados esperados, começaremos tudo novamente", disse o diretor.
Ainda há muito mistério em relação ao lançamento da nova plataforma no software, a V6, a mesma utilizada pelo Catia e apresentada no evento mundial em 2010. O diretor de desenvolvimento, Kishore Boyalakuntla, preferiu não comentar sobre os boatos de que será baseada em cloud-computing e se limitou a dizer que ela estará disponível em "algum momento em 2013". Boyalakuntla diz que não há pressão para colocá-lo em prática, "uma nova plataforma só se justifica quando pudermos oferecer algo muito melhor do que já temos e vamos trabalhar até conseguirmos isto. Se não alcançarmos os resultados esperados, começaremos tudo novamente", disse o diretor. Por outro lado, o CEO da Solidworks, o francês Bertrand Sicout, quis tranquilizar usuários e garantiu que não haverá nenhuma transição obrigatória e imediata. "Faremos esforços para que a mudança ocorra o mais rápido possível, mas isso deve significar sete ou oito anos de convívio entre as duas versões", declarou.
* Juliana Passos viajou a San Diego à convite da DS Solidworks
Fonte: CIMM - 29/02/2012
Assinar:
Postagens (Atom)